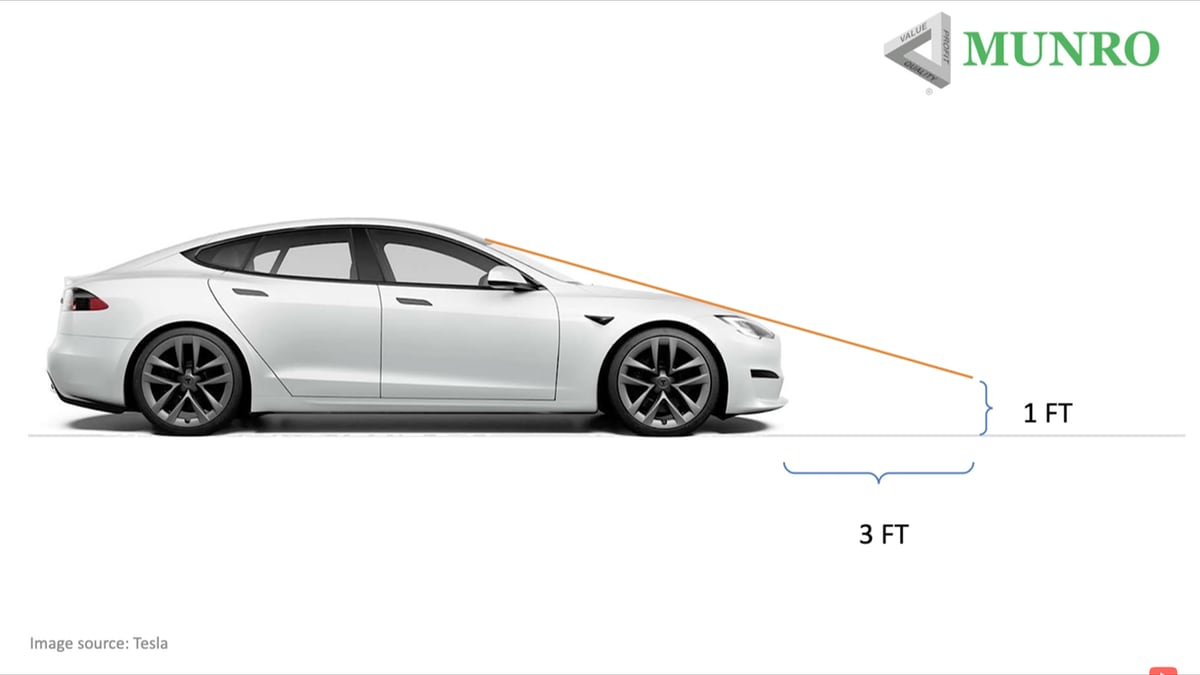
Will Teslas have a blind spot directly in front of the vehicle?
Munro
They may look sleek and smooth without those circular sonic sensors, but the non-ultra-sonic Tesla was not welcomed with open arms by hundreds of Reddit users.
Two weeks after announcing it was removing ultrasonic sensors (USS), new Model 3s were delivered to owners looking noticeably less polka-dotted, leading to heated debates and several unanswered questions as the company transitions to an improved Tesla Vision and its occupancy network.
A few users said they would cancel their order, questioning how the system could effectively replace the sensors parking. User Zeek215 posted: "I had a base Model 3 to be delivered next month. I'm cancelling because of this. Not just because of the USS, but it's a trend in the wrong direction for what is an expensive car." MunroLivereported Tesla would save $114 per vehicle by eliminating USS. Users said they would have gladly paid the additional $114 to keep the system in the car.
However, this figure doesn't include the additional logistics needed to source, stock and maintain these sensors.
Munro takes a look at Tesla's USS
The biggest question about removing the USS system and going strictly with Vision is regarding accuracy. Tesla owners like pulling into parking spaces or garages and having the sensors indicate down to inches the distance to objects. The concern is that precision will be lost, and many people believe there is no way Vision can replace it.
But people were defending the switch. Callmesaul8889 posted: "Who said they don't know if they can guarantee feature parity? I've heard a bunch of Redditors claim that, but Tesla has explicitly said they feel they can match or exceed the USSs with Vision alone in the original announcement... I get the impression that some of you guys assume Tesla has a bunch of dumb dumb engineers who are constantly cutting costs without thinking of the consequences..."
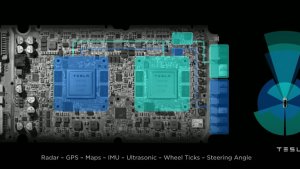
Tesla anticipated these concerns when it announced it was removing USS. In that announcement, it stated: With today's software, this approach gives Autopilot high-definition spatial positioning, longer range visibility and ability to identify and differentiate between objects. As with many Tesla features, our occupancy network will continue to improve rapidly over time.
Many Reddit users who were more supportive of the Vision system believe it will reach parity with USS quickly, as the company said in the initial announcement. We will know when Tesla is confident with Vision when the non-polka dot vehicles get some features enabled.
For example, the non-USS Teslas will not be able to use Park Assist, Autopark, Summon or Smart Summon. But according to Tesla's website: once these features achieve performance parity with today's vehicles, they will be restored via a series of over-the-air software updates.
Another popular question was if the company would stop supporting the system in USS-enabled vehicles. Telsa posted: At this time, we do not plan to remove the functionality of ultrasonic sensors in our existing fleet. USS will be removed from the Model S and Model X in 2023.
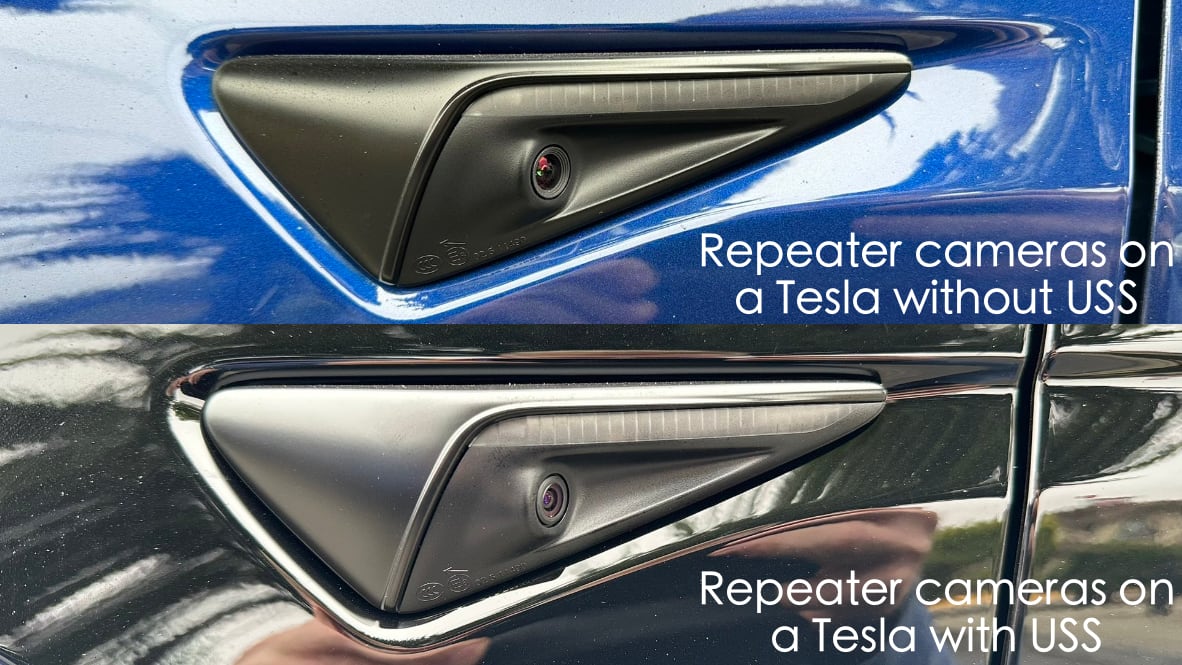
The Kilowatts on Twitter took a close look at these new Teslas' cameras and discovered no significant differences between the two.
The repeater camera on a Tesla without USS compared to a current Tesla with USS
@klwtts/Twitter
Some speculated that Tesla would add a front bumper camera, but that doesn't appear to be the case. The biggest noticeable change is that the repeater cameras on the fenders appeared to have a slightly different housing. There's no word whether the lens itself, the sensor, or the angle of the camera is any different from previous Teslas.
Cybertruck
Since the Cybertruck's introduction, we've wondered how Tesla would integrate ultrasonic sensors into the vehicle, however, it looks like we now have our answer.
There's no question that this move cuts costs and reduces complexity for Tesla, allowing them to manufacture even more vehicles and increase operating profits. The only question is how close can Tesla's occupancy network get to the accuracy that ultrasonic sensors provide.
Cybertruck Unveiling in Five Minutes
Subscribe
Subscribe to our newsletter to stay up to date on the latest Tesla news, upcoming features and software updates.
At the recent X Takeover event this past weekend, two of Tesla’s most important leaders gave in-depth interviews that provided a unique view into Tesla’s path forward and how everything comes together internally.
An interview with Elon Musk laid out the grand vision for Tesla and his other companies, focusing on the ambitious “what and why.” Later, Head of Vehicle Engineering Lars Moravy provided the more grounded, engineering-focused “how,” detailing the immense work it takes to turn the vision into a reality.
What emerged from these conversations was a clearer picture of Tesla’s strategy: a relentless, long-term vision for the future of transportation, AI, robotics, and energy, supported by a world-class engineering team capable of developing the processes to turn these products into a reality.
Robotaxi & Cybercab
For years, the concept of Unsupervised FSD, as well as Robotaxis, has been the focal point of Tesla’s future. In his interview, Elon provided fresh details on the way they expect the business model to work. Tesla plans to operate a fleet where some vehicles are company-owned, while others are owned by customers. This is essentially a combination of Uber and Airbnb, taking a bit of a hybrid approach between the two different styles.
He also went on to confirm that the purpose-built, two-seater Cybercab would complement, but not replace, Tesla’s existing models. This is key, because many have thought that Tesla would end their consumer vehicle sales or drastically reduce them as they transitioned to an AI services company, and became less of a car company. Now, it seems we know that they’ll have a lasting stake in personal car ownership.
The Cybercab, which is a revolutionary vehicle without driver controls, requires an equally revolutionary process to build it. In his interview, Lars Moravy provided the answer and detailed the unboxed manufacturing process that Tesla has been developing.
The unboxed method challenges a century of established automotive assembly by breaking the vehicle down into smaller, parallel sub-assemblies, allowing more work to be done simultaneously. The goal is to drastically shorten the main assembly line, enabling vehicle sections to be built in parallel and come together at the end.
Lars also noted that Tesla has already done the initial batch of crash testing for the Cybercab prototypes, and the vehicle has passed with flying colors. This isn’t surprising for Tesla, which integrates vehicle safety right into the structure of the vehicle, building castings that transfer force away from occupants.
The Semi
While Elon’s interview focused on some of his grander ambitions like Mars colonization, Lars provided some tangible updates on two of Tesla’s most anticipated vehicles.
On the Tesla Semi, Lars confirmed that progress is well underway at the Semi factory in Reno, Nevada. After years of focusing on engineering prototypes to ensure the reliability of a commercial workhorse vehicle, Tesla is now expected to ramp up production by the end of 2025, continuing through into early 2026. The business case for the Semi is crystal clear - build a no-brainer choice for shipping and logistics companies, who need to weigh the initial buy-in and infrastructure costs against operating costs per mile.
The Semi, just like other EVs, absolutely trumps diesel trucks in cost per mile, due to lower energy costs and less maintenance. However, the somewhat hidden advantage here is that truck drivers drastically prefer to drive the Tesla Semi over other diesel trucks, citing things such as better visibility, a smoother ride, and easier driving. These are advantages that could lead to improved employee retention and easier driver recruitment.
Meanwhile, the Semi simply needs to have infrastructure installed at the starting and ending locations for major delivery companies, enabling end-to-end supply chain handover.
The Roadster
Lars also talked about Tesla’s upcoming Roadster, confirming that it’s still in development, with the team preparing for a mind-blowing demo sometime soon. Elon previously hinted at this demo during a visit to the Tesla Design Studio, where he said a mind-blowing demo would be coming by the end of the year.
The goal for Tesla is to make it the last, best driver’s car before the world begins transitioning to full autonomy. Lars also touched on one of the biggest challenges with the Roadster. There is an immense engineering challenge being taken on now - and it's the SpaceX package. This package is set to use cold-gas thrusters to push the Roadster past what is conventionally possible. In fact, just as Elon has previously mentioned, the Roaster may be able to “fly a little.”
Last, best driver’s car
Lars Moravy
You can watch the full interview below. Lar’s portion on the Roadster starts at 26:30.
Optimus: Sustainable Abundance
One of the most ambitious parts of Elon’s vision is the Optimus humanoid robot. He has stated his belief many times that the robotics business could be many times more valuable than Tesla’s entire automotive business, and if it works as planned, it definitely will be.
The current Optimus V3 design is intended for volume production, with Elon foreseeing a future market of billions of humanoid robots - not made just by Tesla, but the market as a whole. That many units could simply eliminate human poverty and usher in an age of sustainable abundance.
That grand vision is built on top of the manufacturing and automation expertise that Lars’ team is pioneering every day. With volume production of Optimus to begin next year, and real work already being done in Tesla’s factories, we may see humanoid robots making a real impact on the lifestyle and livelihood of people within the next few years.
The Unfair Advantage: Getting Sh*t Done
All of these ambitious ideas and products are enabled what what is perhaps Tesla’s true sauce - its unique internal culture of getting sh*t done. Lars’ interview provided us with a rare look inside to see just how it all comes together.
He described working with Elon as unique - the discussions are grounded in physics, and Elon trusts his teams to turn his dreams and ambitions into reality. This, in turn, creates a culture of mutual respect and high expectations.
The collaborative spirit extends to the relationship between engineering and design, which Lars described as highly unusual for the auto industry. Rather than the two teams being hostile to each other, they work together to make bold design and engineering choices, like the Cybertruck, into reality.
Underpinning all of this is what Lars himself calls Tesla’s superpower: in-house automation and manufacturing engineering teams. These teams work to design the machine that builds the machines - innovating and solving problems at a level and speed that is simply not possible when relying on external vendors.
This combination of a relentless long-term vision, alongside a first-principles engineering culture, allows Tesla to take big risks and make big plays that define its future path. While all of Tesla’s timelines are ambitious, these interviews make it clear that the ambitious vision is paired with a concrete and innovative plan for execution.
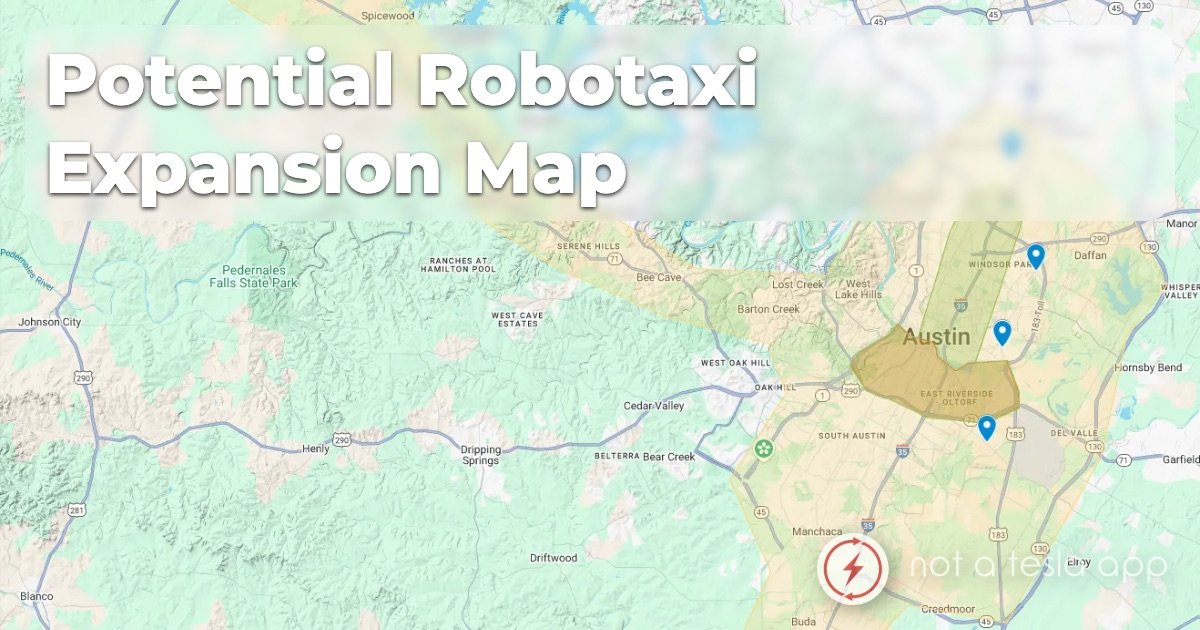
The map above compares Tesla's current geofence with their potential expansion in yellow.
Not a Tesla App
With Tesla’s first major expansion of the Robotaxi Geofence now complete and operational, they’ve been hard at work with validation in new locations - and some are quite the drive from the current Austin Geofence.
Validation fleet vehicles have been spotted operating in a wider perimeter around the city, from rural roads in the west end to the more complex area closer to the airport. Tesla mentioned during their earnings call that the Robotaxi has already completed 7,000 miles in Austin, and it will expand its area of operation to roughly 10 times what it is now. This lines up with the validation vehicles we’ve been tracking around Austin.
Based on the spread of the new sightings, the potential next geofence could cover a staggering 450 square miles - a tenfold increase from the current service area of roughly 42 square miles.
If Tesla decides to expand into these new areas, it would represent a tenfold increase over their current geofence, matching Tesla’s statement. The new area would cover approximately 10% of the 4,500-square-mile Austin metropolitan area. If Tesla can offer Robotaxi services in that entire area, it would prove they can tackle just about any city in the United States.
In the map below, the blue icons are sightings of Tesla validation vehicles, while the yellow map area represents their potential expansion. The map overlays Tesla’s phases 1 and 2 and compares them to Waymo’s first two phases. You can toggle each one by tapping the icon at the top left and choosing which geofences you’d like to view.
From Urban Core to Rural Roads
The locations of the validation vehicles show a clear intent to move beyond the initial urban and suburban core and prepare the Robotaxi service for a much wider range of uses.
In the west, validation fleet vehicles have been spotted as far as Marble Falls - a much more rural environment that features different road types, higher speed limits, and potentially different challenges.
In the south, Tesla has been expanding towards Kyle, which is part of the growing Austin-San Antonio suburban corridor spanning Highway 35. San Antonio is only 80 miles (roughly a 90-minute drive) away, and could easily become part of the existing Robotaxi area if Tesla obtains regulatory approval there.
In the East, we haven’t spotted any new validation vehicles. This is likely because Tesla’s validation vehicles originate from Giga Texas, which is located East of Austin. We won’t really know if Tesla is expanding in this direction until they start pushing past Giga Texas and toward Houston.
Finally, there have been some validation vehicles spotted just North of the new expanded boundaries, meaning that Tesla isn’t done in that direction either. This direction consists of the largest suburban areas of Austin, which have so far not been serviced by any form of autonomous vehicle.
Rapid Scaling
This new, widespread validation effort confirms what we already know. Tesla is pushing for an intensive period of public data gathering and system testing in a new area, right before conducting geofence expansions. The sheer scale of this new validation zone tells us that Tesla isn’t taking this slowly - the next step is going to be a great leap instead, and they essentially confirmed this during this Q&A session on the recent call. The goal is clearly to bring the entire Austin Metropolitan area into the Robotaxi Network.
While the previous expansion showed off just how Tesla can scale the network, this new phase of validation testing is a demonstration of just how fast they can validate and expand their network. The move to validate across rural, suburban, and urban areas simultaneously shows their confidence in these new Robotaxi FSD builds.
Eventually, all these improvements from Robotaxi will make their way to customer FSD builds sometime in Q3 2025, so there is a lot to look forward to.












![No Driver Needed: Tesla FSD Stops at Toll, Waits for Driver to Pay and Takes Off Again [VIDEO]](https://www.notateslaapp.com/img/containers/article_images/fsd-beta/fsd-toll-booth.webp/57e008aff60c6c1e998e304eca200cda/fsd-toll-booth.jpg)



_300w.png)