Tesla made a lot of improvements in the 2024 Holiday Update, including more than 15 undocumented improvements that were included in the release. One of these was a stealthy performance improvement to the YouTube app.
Several people have mentioned they’ve seen improved performance on YouTube since this year’s Holiday Update - and there’s an interesting reason why.
YouTube Improvements
The improved YouTube performance in Tesla vehicles comes from an unexpected source—Tesla actually rolled back support for YouTube’s newer AV1 video encoding. Instead, vehicles now default to the older VP9 encoding standard.
While AV1 is highly efficient in terms of bandwidth, it requires considerably more processing power to decode and display videos. VP9, on the other hand, is less computationally demanding but uses more bandwidth to achieve the same video quality. This trade-off means smoother playback and better overall performance, even if it comes at the cost of slightly higher data usage.
Intel Inside
The VP9 video codec that the YouTube app is now using is much easier to decode, making it less taxing on the vehicle’s processor. This change is particularly beneficial for Tesla vehicles with Intel processors, which previously struggled to stream video at just 720p. When using AV1, these vehicles often experienced stuttering, sometimes forcing the YouTube app to automatically downgrade playback to 480p.
With this update, Intel-based Teslas should now be able to stream at 1080p smoothly. Streaming at 1440p is also possible, although occasional stutters still occur as the system keeps up with the decoding process.
Intel-based vehicles are the big winners with this change, but this appears to affect AMD Ryzen-based infotainment units as well, providing even smoother playback.
Chromium Web App
Tesla’s Theater apps aren’t native applications; instead, they run as chromeless web apps, leveraging the open-source browser built into Teslas known as Chromium (the open-source version of Chrome). Although this works quite well, there is a severe limitation - Chromium hardware acceleration isn’t supported on Linux, the operating system Tesla uses for their OS.
As a result, Tesla vehicles rely on software decoding instead of hardware decoding, which would otherwise handle video playback far more efficiently. A potential solution could be for Tesla to transition away from Chromium-based web apps in favor of a Mozilla Firefox-based browser, as Firefox does support hardware acceleration on Linux. This switch could also open the door to better streaming performance and the possibility of expanding Tesla’s in-car entertainment options.
However, Tesla’s choice of Chromium likely stems from Digital Rights Management (DRM) requirements for streaming services like Disney+ and Netflix, which rely on DRM-enabled playback. Firefox on Linux has had inconsistent support for DRM due to codec availability and variations in operating system versions.
We’re hopeful that Tesla will either adopt Firefox or develop a fully native application to improve video streaming, rather than continuing with the current web-based Tesla Theater. This shift could also pave the way for additional in-car applications built on Tesla’s native Linux environment—perhaps even reviving the long-rumored Tesla App Store.
Regardless, this update is a welcome improvement, particularly for YouTube, which remains one of the most widely used Theater Mode apps due to its accessibility, free content, and mix of short and long-form videos. It remains to be seen whether similar improvements are made for Netflix, Disney+, or other streaming platforms.
If you’ve noticed improved performance in Theater Mode, now you know why.
Thanks to Brian Zheng for making us aware of these changes.
Subscribe
Subscribe to our newsletter to stay up to date on the latest Tesla news, upcoming features and software updates.
The massive legislative effort titled the "Big Beautiful Bill" is taking direct aim at what has become one of Tesla’s most critical and profitable revenue streams: the sale of US regulatory credits. The bill could eliminate billions of dollars from Tesla’s bottom line each year and will slow down the transition to electric vehicles in the US.
The financial stakes for Tesla are absolutely immense. In 2024, Tesla generated $2.76 billion from selling these credits. This high-margin revenue was the sole reason Tesla posted a profit in Q1 2025; without the $595 million from regulatory credits, Tesla’s reported $409 million in profit would have been a $189 million loss.
How the ZEV Credit System Works
Zero-Emission Vehicle (ZEV) credits are part of state-level programs, led by California, designed to accelerate the adoption of electric vehicles. Each year, automakers are required to hold a certain number of ZEV credits, with the amount based on their total vehicle sales within that state. Under this system, automakers that fail to sell a certain percentage of zero-emission vehicles must either pay a significant fine or purchase credits from a company that exceeds the mandate.
Automakers who fail to sell enough EVs to meet their quota have a deficit and face two choices: pay a hefty fine to the state government for each missing credit (for example, $5,000 per credit in California) or buy credits from a company with a surplus.
As an all-EV company, Tesla generates a massive surplus of these credits. It can then turn around and sell them to legacy automakers at prices cheaper than the fine, creating a win-win scenario: the legacy automaker avoids a larger penalty, and Tesla gains a lucrative, near-pure-profit revenue stream.
This new bill will dismantle this by eliminating the financial penalties for non-compliance, which would effectively make Tesla’s credits worthless. While the ZEV program is a state law, the Big Beautiful Bill will fully eliminate the penalties at a federal level.
A Multi-Billion Dollar Impact
The removal of US ZEGV credits would be a severe blow to Tesla’s financials. One JPMorgan analyst estimated that the move could reduce Tesla’s earnings by over 50%, representing a potential annual loss of $2 billion. While Tesla also earns similar credits in Europe and China, analysts suggest that 80-90% of its credit revenue in Q1 2025 came from US programs.
Why the Program Exists
While the impact on Tesla would be direct and immediate, the credit system has a wider purpose. It creates a strong financial incentive for legacy automakers to develop and accelerate their zero-emission vehicle programs, whether it’s hydrogen, electric, or another alternative.
Eliminating the need for these credits would remove that financial pressure. This could allow traditional automakers to slow their EV transition in the US without the fear of a financial penalty, potentially leading to fewer EV choices for consumers and a slower path to vehicle electrification in the country.
Big, But Not Beautiful
On Sunday Morning TV, Elon Musk was asked his thoughts on the Big Beautiful Bill. They were pretty simple. A bill could be big, or it could be beautiful - I don’t know if it can be both, Musk stated.
Elon Musk in new interview: "I was disappointed to see the massive spending bill, frankly, which increases the budget deficit and undermines the work the DOGE team is doing. I think a bill could be big, or it could be beautiful—I don't know if it can be both." pic.twitter.com/DnyjHN7xCY
The bill poses a threat to Tesla’s bottom line and to the adoption of EVs in the US market, where automakers will no longer have a financial incentive to transition to cleaner vehicles, a market they’ve regularly struggled in when competing against Tesla.
Tesla will have to work carefully in the future to cut expenses to remain profitable after the elimination of these regulatory credits.
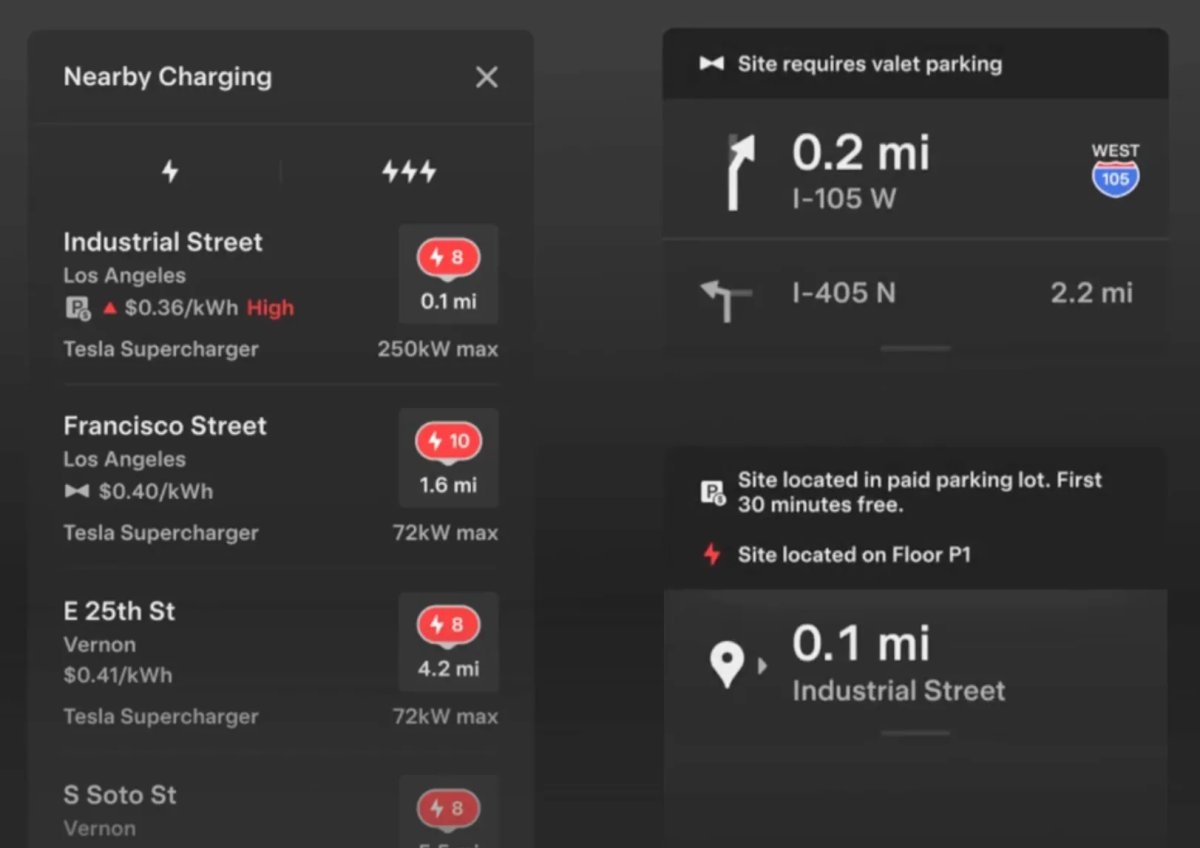
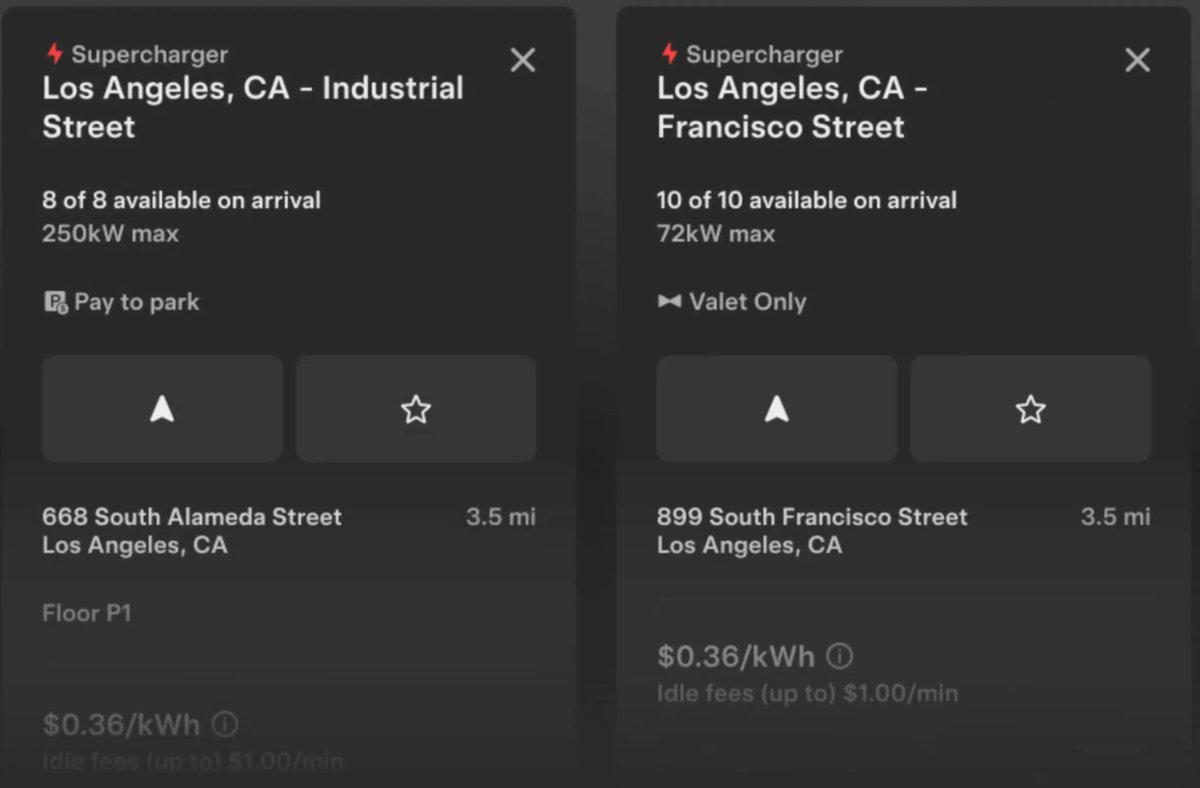
Tesla is rolling out a thoughtful and much-needed update to its in-vehicle Supercharger UI. The update is designed to provide drivers with details about Superchargers and their locations.
The update will add new icons and contextual messages to clarify Supercharger access requirements or restrictions, such as paid parking. There’s nothing worse than navigating to a Supercharger only to find out it's only for customers, requires paid parking, or some other service.
The new details will appear in various locations, including the Supercharger list, Supercharger module, and above the navigation directions when navigating to a Supercharger.
The new Supercharger icons will indicate the following requirements:
Valet-only Parking
Pay to Park
Access Codes
Parking Floor (the floor the Supercharge is on in a parking garage)
These icons are initially displayed when you’re searching for a Supercharger in the list of Superchargers. Additionally, when navigating to a site that includes any of the above, your vehicle will now display specific alerts for access requirements.
Access Codes and Parking Floor information will be provided above the navigation card when you reach the destination.
Solving Common Frustrations
Not a Tesla App
While these may seem like minor tweaks, they are a direct solution to some long-standing and common frustrations for many Tesla owners. Many drivers have likely experienced the scenario of following navigation to an unfamiliar urban Supercharger, only to arrive and discover it’s buried deep within a paid parking garage, with no advance warning of the fees or specific floor location.
This update provides all the critical information upfront so that drivers can make informed decisions on where they would like to charge. No more surprise parking fees, no circling a multi-level garage at 3% battery, desperately searching for the red and white Supercharger signs, and no more getting stuck searching for an access code to charge.
Little Details Matter
These Supercharger updates are the definition of quality-of-life improvements. Little details that make a big difference in usability.
As the Supercharger network continues its massive expansion into more complex and densely populated urban centers, providing this kind of granular, logistical data becomes increasingly important.
Release Date
While Tesla hasn’t announced when these features will be added, they’ll likely be included in the next major Tesla software update, presumably update 2025.24 or 2025.26.
The Tesla app was recently updated to v4.46.5 and added the ability to restrict location visibility for other drivers of the vehicle. Although the app update didn’t include these Supercharger updates, we expect these new Supercharger details to also be added to the Tesla app soon.